|
I am a research scientist at OpenAI. I completed my PhD at UC Berkeley, where I was advised by Sergey Levine. I studied how to apply deep reinforcement learning for robotics. I completed my B.S. at Cornell University, where I worked with Ross Knepper and Hadas Kress-Gazit.
CV (March 2019) /
LinkedIn /
GitHub /
PhD Thesis
|

|
|
|
 |
Meta-reinforcement learning (RL) can meta-train policies that adapt to new tasks with orders of magnitude less data than standard RL, but meta-training itself is costly and time-consuming. If we can meta-train on offline data, then we can reuse the same static dataset, labeled once with rewards for different tasks, to meta-train policies that adapt to a variety of new tasks at meta-test time. Although this capability would make meta-RL a practical tool for real-world use, offline meta-RL presents additional challenges beyond online meta-RL or standard offline RL settings. Meta-RL learns an exploration strategy that collects data for adapting, and also meta-trains a policy that quickly adapts to data from a new task. Since this policy was meta-trained on a fixed, offline dataset, it might behave unpredictably when adapting to data collected by the learned exploration strategy, which differs systematically from the offline data and thus induces distributional shift. We do not want to remove this distributional shift by simply adopting a conservative exploration strategy, because learning an exploration strategy enables an agent to collect better data for faster adaptation. Instead, we propose a hybrid offline meta-RL algorithm, which uses offline data with rewards to meta-train an adaptive policy, and then collects additional unsupervised online data, without any reward labels to bridge this distribution shift. By not requiring reward labels for online collection, this data can be much cheaper to collect. We compare our method to prior work on offline meta-RL on simulated robot locomotion and manipulation tasks and find that using additional unsupervised online data collection leads to a dramatic improvement in the adaptive capabilities of the meta-trained policies, matching the performance of fully online meta-RL on a range of challenging domains that require generalization to new tasks. |
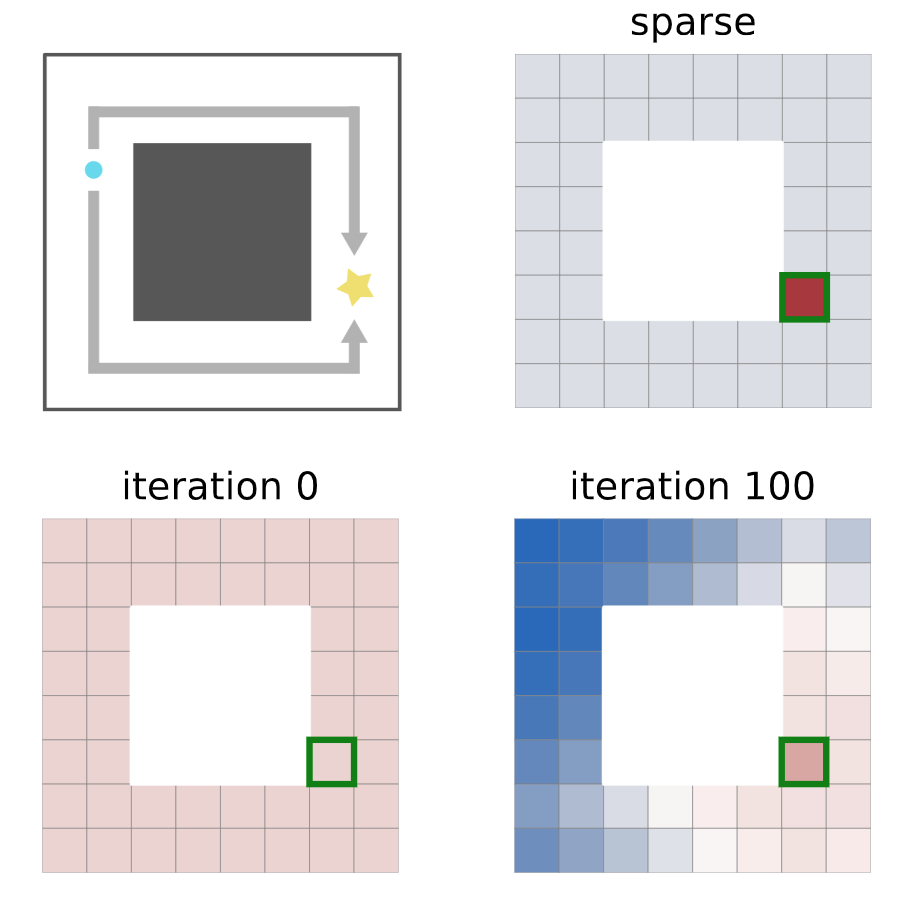 |
While reinforcement learning algorithms provide automated acquisition of optimal policies, practical application of such methods requires a number of design decisions, such as manually designing reward functions that not only define the task, but also provide sufficient shaping to accomplish it. In this paper, we discuss a new perspective on reinforcement learning, recasting it as the problem of inferring actions that achieve desired outcomes, rather than a problem of maximizing rewards. To solve the resulting outcome-directed inference problem, we establish a novel variational inference formulation that allows us to derive a well-shaped reward function which can be learned directly from environment interactions. From the corresponding variational objective, we also derive a new probabilistic Bellman backup operator reminiscent of the standard Bellman backup operator and use it to develop an off-policy algorithm to solve goal-directed tasks. We empirically demonstrate that this method eliminates the need to design reward functions and leads to effective goal-directed behaviors. |
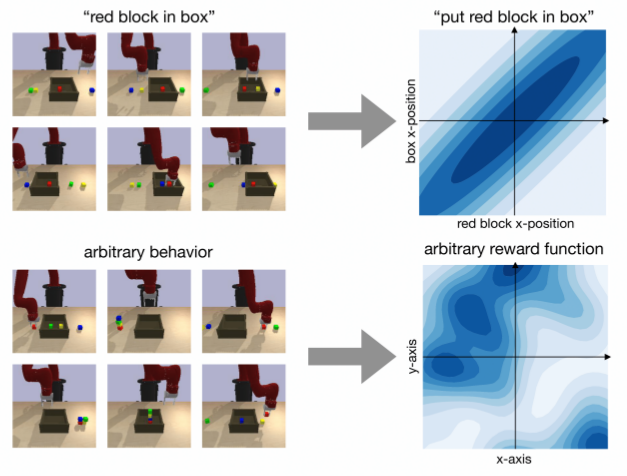 |
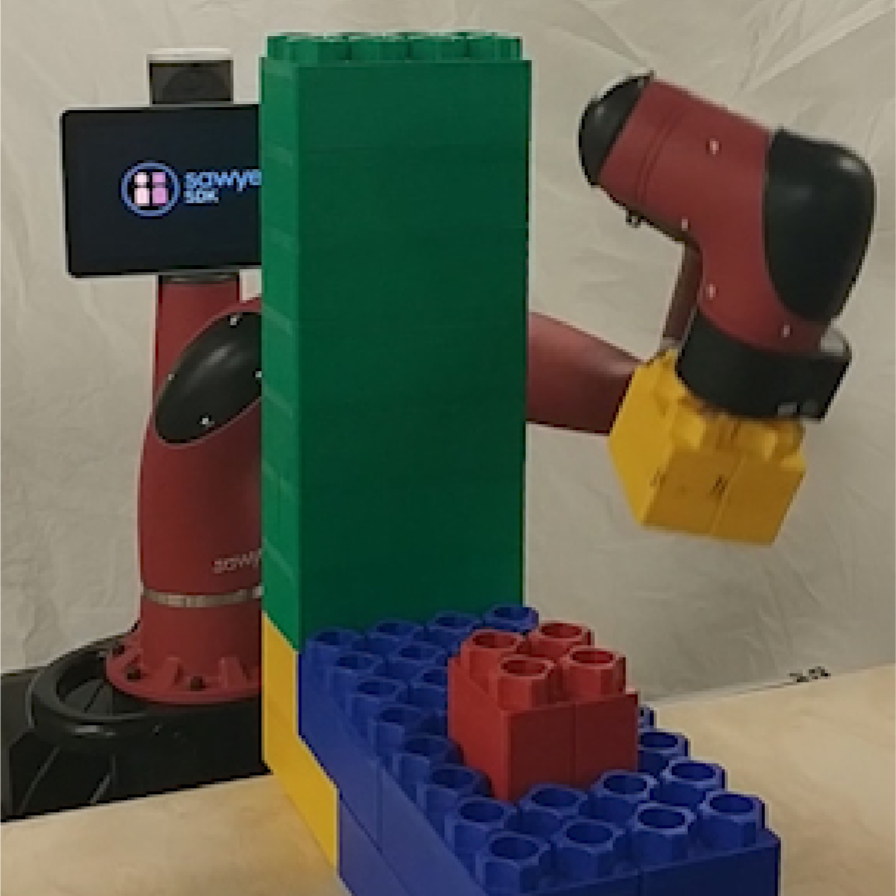
Can we use reinforcement learning to learn general-purpose policies that can perform a wide range of different tasks, resulting in flexible and reusable skills? Contextual policies provide this capability in principle, but the representation of the context determines the degree of generalization and expressivity. Categorical contexts preclude generalization to entirely new tasks. Goal-conditioned policies may enable some generalization, but cannot capture all tasks that might be desired. In this paper, we propose goal distributions as a general and broadly applicable task representation suitable for contextual policies. Goal distributions are general in the sense that they can represent any state-based reward function when equipped with an appropriate distribution class, while the particular choice of distribution class allows us to trade off expressivity and learnability. We develop an off-policy algorithm called distribution-conditioned reinforcement learning (DisCo RL) to efficiently learn these policies. We evaluate DisCo RL on a variety of robot manipulation tasks and find that it significantly outperforms prior methods on tasks that require generalization to new goal distributions. |
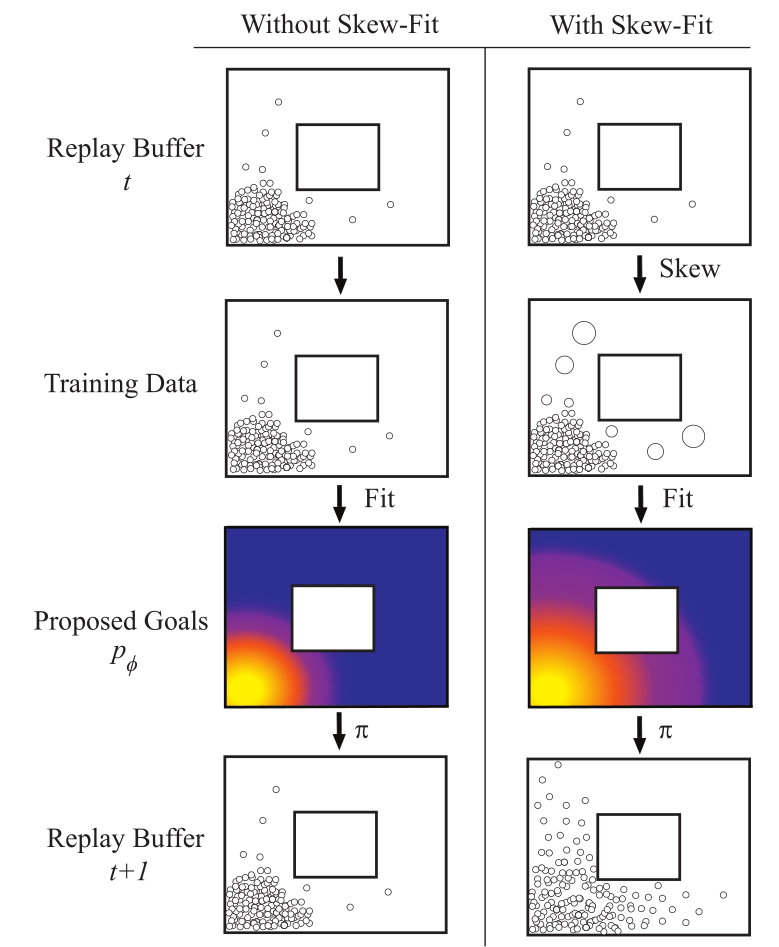 |
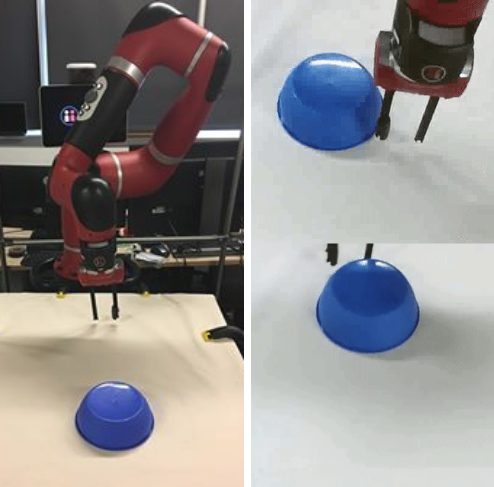
For an autonomous agent to fulfill a wide range of user-specified goals at test time, it must be able to learn broadly applicable and general-purpose skill repertoires. Furthermore, to provide the requisite level of generality, these skills must handle raw sensory input such as images. In this paper, we propose an algorithm that acquires such general-purpose skills by combining unsupervised representation learning and reinforcement learning of goal-conditioned policies. Since the particular goals that might be required at test-time are not known in advance, the agent performs a self-supervised "practice" phase where it imagines goals and attempts to achieve them. We learn a visual representation with three distinct purposes: sampling goals for self-supervised practice, providing a structured transformation of raw sensory inputs, and computing a reward signal for goal reaching. We also propose a retroactive goal relabeling scheme to further improve the sample-efficiency of our method. Our off-policy algorithm is efficient enough to learn policies that operate on raw image observations and goals for a real-world robotic system, and substantially outperforms prior techniques. |
 |
For an autonomous agent to fulfill a wide range of user-specified goals at test time, it must be able to learn broadly applicable and general-purpose skill repertoires. Furthermore, to provide the requisite level of generality, these skills must handle raw sensory input such as images. In this paper, we propose an algorithm that acquires such general-purpose skills by combining unsupervised representation learning and reinforcement learning of goal-conditioned policies. Since the particular goals that might be required at test-time are not known in advance, the agent performs a self-supervised "practice" phase where it imagines goals and attempts to achieve them. We learn a visual representation with three distinct purposes: sampling goals for self-supervised practice, providing a structured transformation of raw sensory inputs, and computing a reward signal for goal reaching. We also propose a retroactive goal relabeling scheme to further improve the sample-efficiency of our method. Our off-policy algorithm is efficient enough to learn policies that operate on raw image observations and goals for a real-world robotic system, and substantially outperforms prior techniques. |
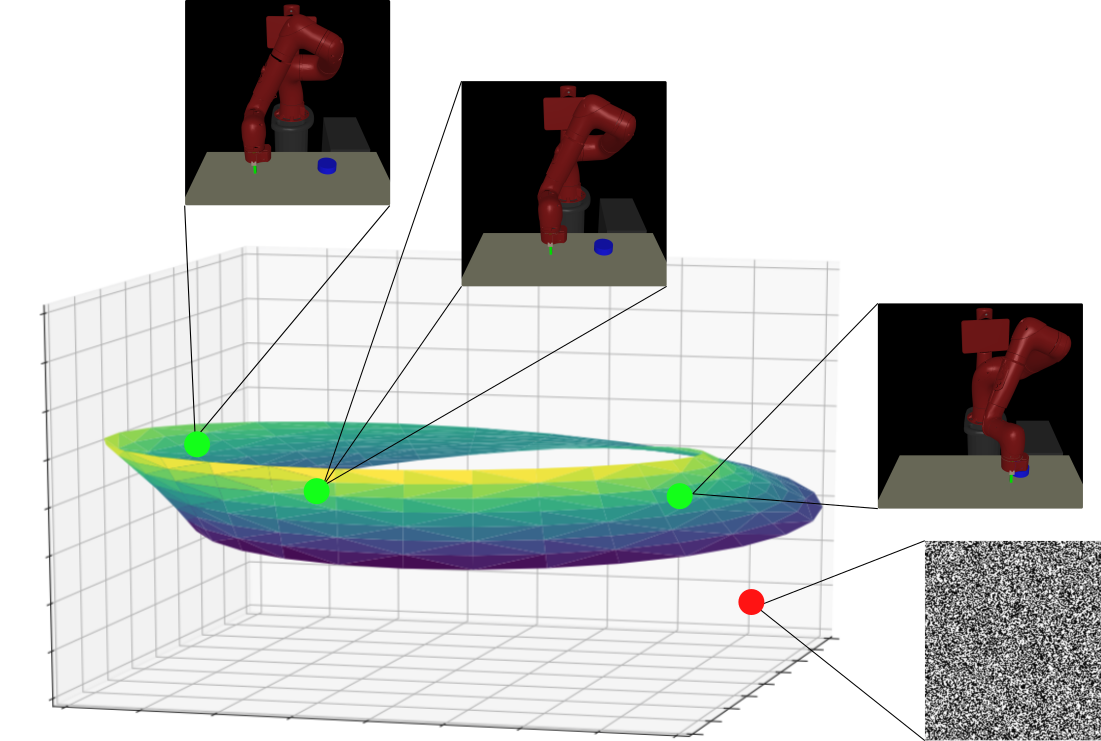 |
Planning methods can solve temporally extended sequential decision making problems by composing simple behaviors. However, planning requires suitable abstractions for the states and transitions, which typically need to be designed by hand. In contrast, model-free reinforcement learning (RL) can acquire behaviors from low-level inputs directly, but often struggles with temporally extended tasks. Can we utilize reinforcement learning to automatically form the abstractions needed for planning, thus obtaining the best of both approaches? We show that goal-conditioned policies learned with RL can be incorporated into planning, so that a planner can focus on which states to reach, rather than how those states are reached. However, with complex state observations such as images, not all inputs represent valid states. We therefore also propose using a latent variable model to compactly represent the set of valid states for the planner, so that the policies provide an abstraction of actions, and the latent variable model provides an abstraction of states. We compare our method with planning-based and model-free methods and find that our method significantly outperforms prior work when evaluated on image-based robot navigation and manipulation tasks that require non-greedy, multi-staged behavior. |
 |
For an autonomous agent to fulfill a wide range of user-specified goals at test time, it must be able to learn broadly applicable and general-purpose skill repertoires. Furthermore, to provide the requisite level of generality, these skills must handle raw sensory input such as images. In this paper, we propose an algorithm that acquires such general-purpose skills by combining unsupervised representation learning and reinforcement learning of goal-conditioned policies. Since the particular goals that might be required at test-time are not known in advance, the agent performs a self-supervised "practice" phase where it imagines goals and attempts to achieve them. We learn a visual representation with three distinct purposes: sampling goals for self-supervised practice, providing a structured transformation of raw sensory inputs, and computing a reward signal for goal reaching. We also propose a retroactive goal relabeling scheme to further improve the sample-efficiency of our method. Our off-policy algorithm is efficient enough to learn policies that operate on raw image observations and goals for a real-world robotic system, and substantially outperforms prior techniques. |
 |
Model-free deep reinforcement learning has been shown to exhibit good performance in domains ranging from video games to simulated robotic manipulation and locomotion. However, model-free methods are known to perform poorly when the interaction time with the environment is limited, as is the case for most real-world robotic tasks. In this paper, we study how maximum entropy policies trained using soft Q-learning can be applied to real-world robotic manipulation. The application of this method to real-world manipulation is facilitated by two important features of soft Q-learning. First, soft Q-learning can learn multimodal exploration strategies by learning policies represented by expressive energy-based models. Second, we show that policies learned with soft Q-learning can be composed to create new policies, and that the optimality of the resulting policy can be bounded in terms of the divergence between the composed policies. |
 |
Model-free reinforcement learning (RL) is a powerful, general tool for learning complex behaviors. However, its sample efficiency is often impractical large for solving challenging real-world problems, even with off-policy algorithms such as Q-learning. We introduce temporal difference models (TDMs), a family of goal-conditioned value functions that can be trained with model-free learning and used for model-based control. TDMs combine the benefits of model-free and model-based RL: they leverage the rich information in state transitions to learn very efficiently, while still attaining asymptotic performance that exceeds that of direct model-based RL methods. |
 |
Practical deployment of reinforcement learning methods must contend with the fact that the training process itself can be unsafe for the robot. In this paper, we consider the specific case of a mobile robot learning to navigate an a priori unknown environment while avoiding collisions. We present an uncertainty-aware model-based learning algorithm that estimates the probability of collision together with a statistical estimate of uncertainty. We evaluate our method on a simulated and real-world quadrotor, and a real-world RC car. |
 |
Training an agent to use past memories to adapt to new tasks and
environments is important for lifelong learning algorithms.
We propose a reinforcement learning method that addresses the
limitations of methods like BPTT and truncated BPTT by training
a critic to estimate truncated gradients and by saving and loading
hidden states outputted by recurrent neural networks.
We present results showing that our algorithm can learn long-term
dependencies while avoiding the computational constraints of BPTT.
|
 |
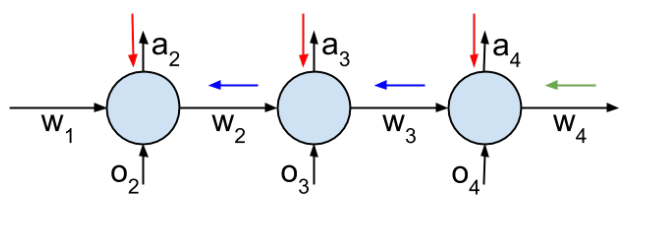
We present and end-to-end approach for the automatic generation of code
that implements high-level robot behaviors in a verifiably correct
manner. We start with Linear Temporal Logic (LTL) equations and use them
to synthesize a reactive mission plana that is gauranteed to satisfy the
formal specifications.
|
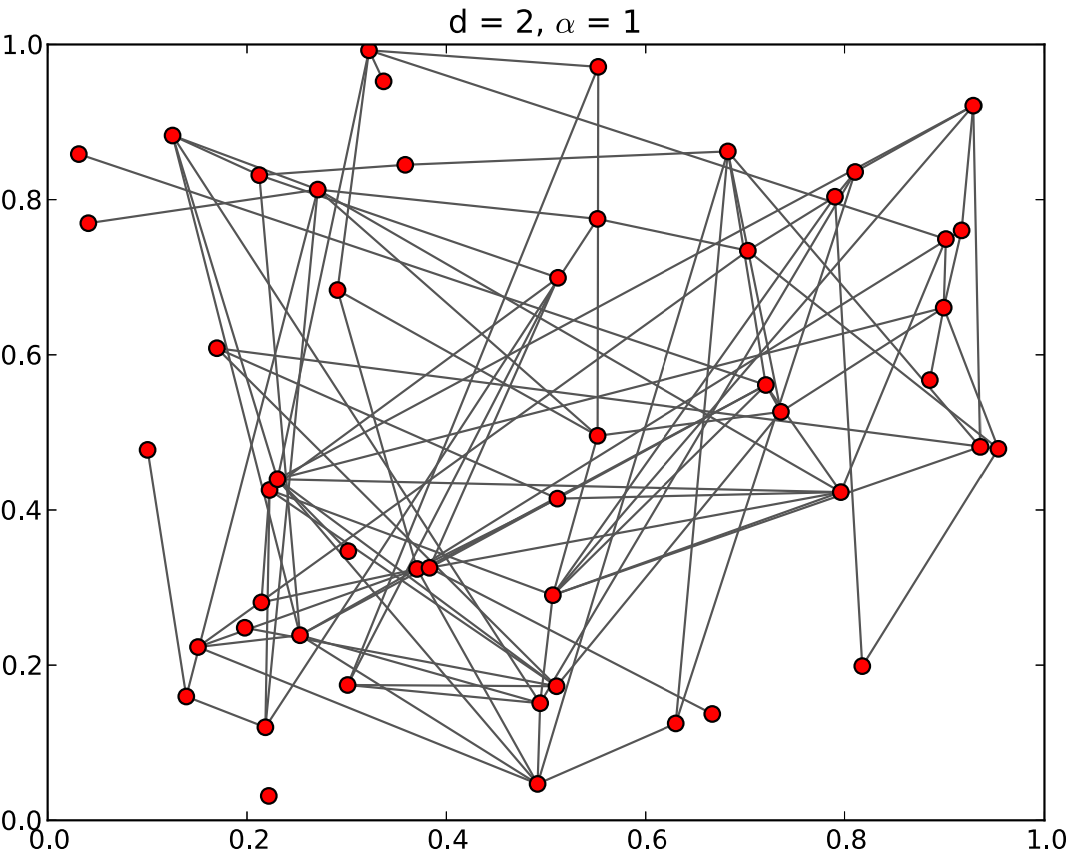 |
We study two different social network models. We prove that their
stationary distributions satisfy the detailed balance condition and give
explicit formulas for the stationary distributions. From this
distribution, we also obtain results about the degree distribution,
connectivity, and diameter for each model. |
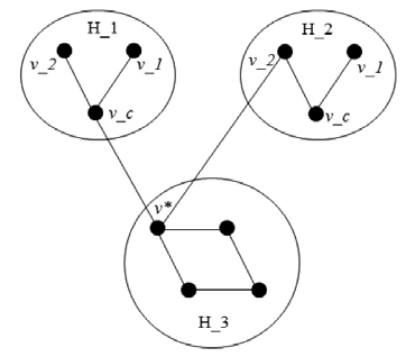 |
Chomp the Graph is a terminating impartial game that adheres to
normal play convetion. By the Sprague-Grundy Theorem, Chomp has a
number, which determines if a position leads to a win if played
optimally. We prove the nimber of certain types of graphs. |
|
|
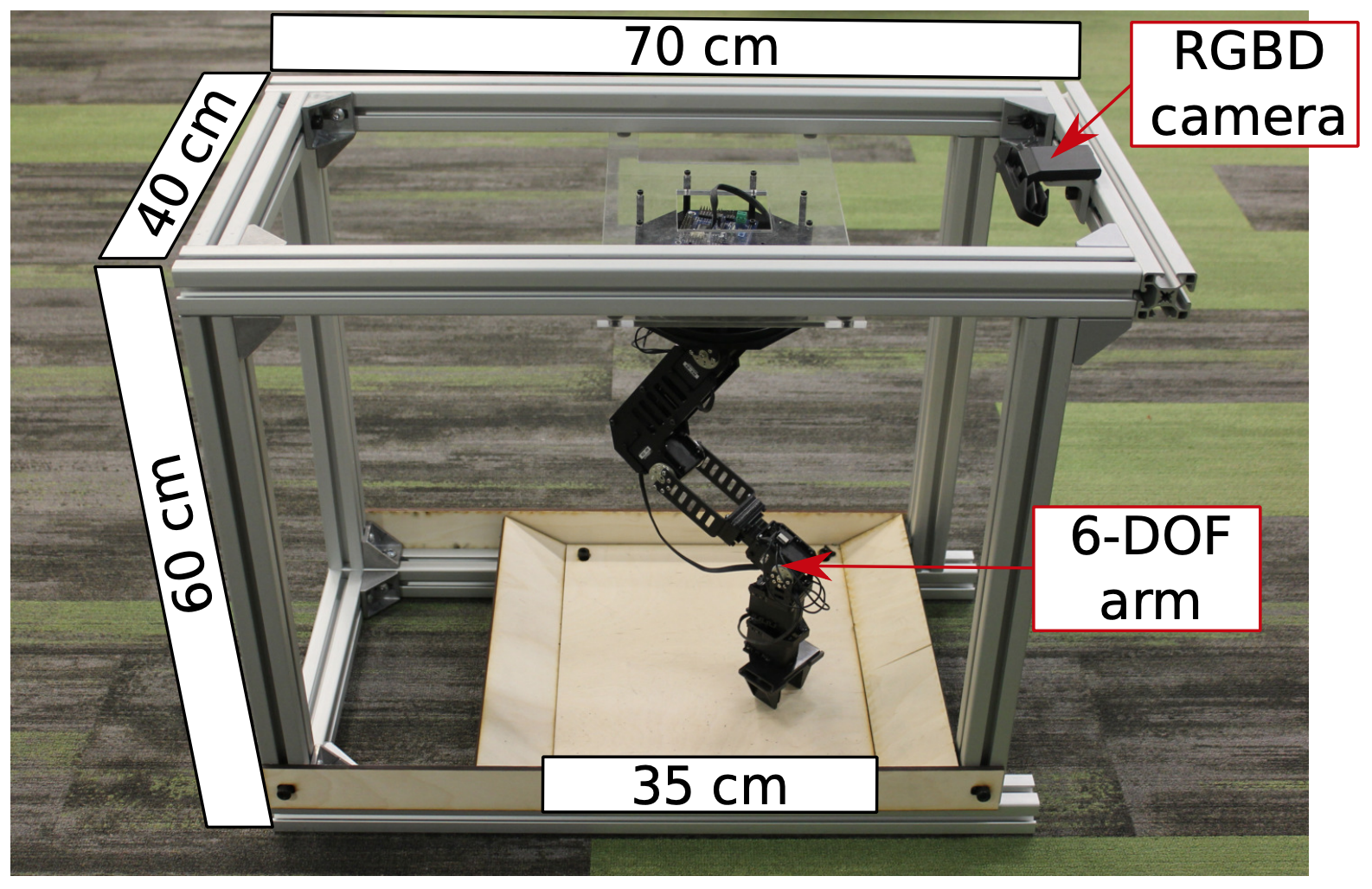 |
Standardized evaluation measures have aided in the progress of machine learning approaches in disciplines such as computer vision and machine translation. In this paper, we make the case that robotic learning would also benefit from benchmarking, and present the "REPLAB" platform for benchmarking vision-based manipulation tasks. REPLAB is a reproducible and self-contained hardware stack (robot arm, camera, and workspace) that costs about 2000 USD, occupies a cuboid of size 70x40x60 cm, and permits full assembly within a few hours. Through this low-cost, compact design, REPLAB aims to drive wide participation by lowering the barrier to entry into robotics and to enable easy scaling to many robots. We envision REPLAB as a framework for reproducible research across manipulation tasks, and as a step in this direction, we define a template for a grasping benchmark consisting of a task definition, evaluation protocol, performance measures, and a dataset of 92k grasp attempts. We implement, evaluate, and analyze several previously proposed grasping approaches to establish baselines for this benchmark. Finally, we also implement and evaluate a deep reinforcement learning approach for 3D reaching tasks on our REPLAB platform. |
|
|
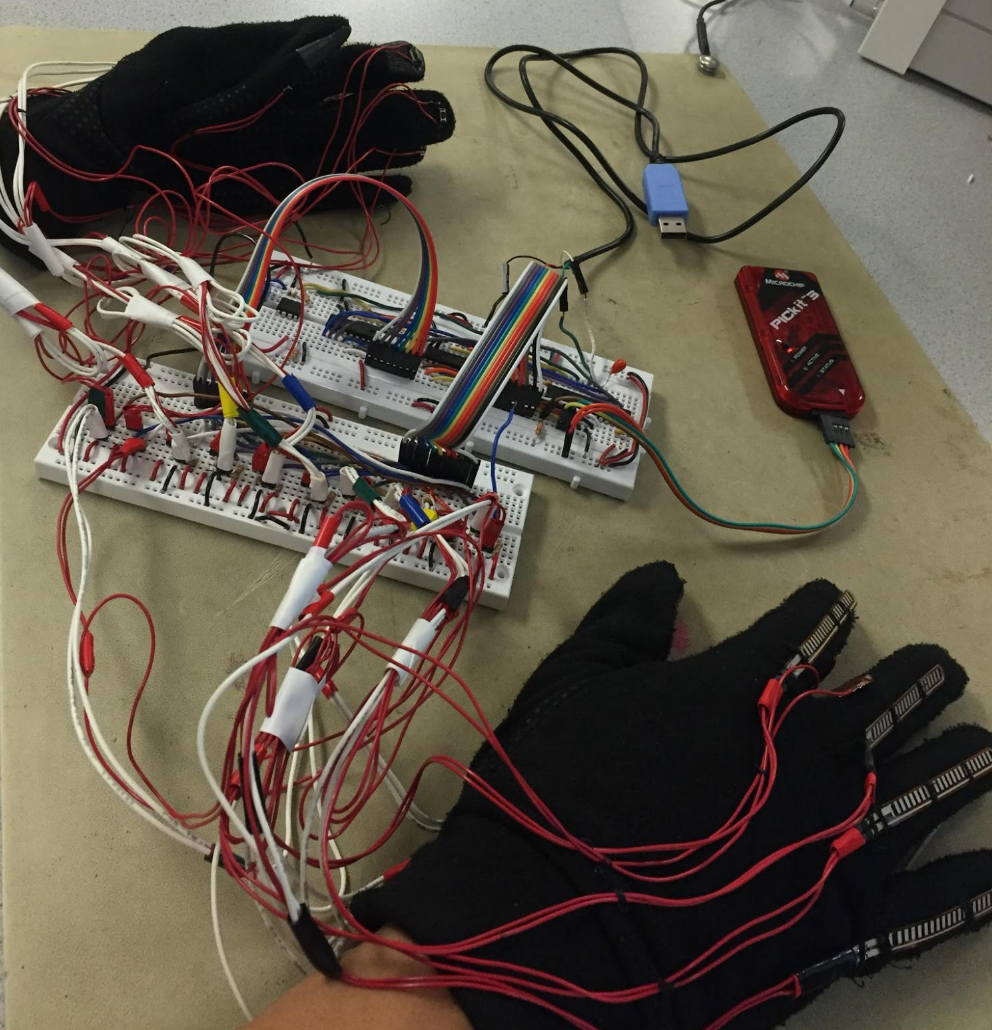 |
Designed and created gloves that allow users to type on any hard surface as if they were using a QWERTY keyboard. The gloves recognize the standard QWERTY keyboard layout by recognizing which finger is pressed via push buttons, and how bent the finger is via flex sensors. We combined knowledge of analog circuit design, serial communication protocols, and embedded programming to implement this project. |
|
|
 |
|
 |
|
 |
|
|
|